First, congratulations to all the teams that flew this year. It was
quite an event.
Thanks to X PRIZE for coming through with webcasts of Masten and
Unreasonable's attempts. I've been glued to my computer screen for the
last 5 days. You guys really put in some effort -- I can only imagine
how draining it must have been to be filming, commentating, and
officiating from out in the desert for all those long days. It was
much appreciated.
It's hard to believe the competition is over. Not just for this year,
but forever.
Watching from the sidelines this year has been difficult, and a bit
frustrating at times.
As the competition concluded last year, we knew there would be some
changes to the format/rules, but I don't think we appreciated how much
they would change the dynamics of the event.
When Masten's L2 vehicle caught fire, I couldn't help but think how
likely that would have been to have ended their chances if they were
flying at Las Cruces.
Also (maybe due in large part to the format change), the judging this
year seemed a bit generous.
We're all about seeing the underdog come out on top, and we don't want
to detract from the amazing effort MSS put in, but allowing Masten a
5th try when they failed on their first four, seemed like a bad call
to us. We'd have understood if their attempts were interfered with by
events out of their control. That was not the case. They tried four
times, and failed four times. Even if the rules allowed for it, giving
MSS a 5th try (and a third day) really seemed unfair to the other
teams in the competition.
We also watched as the judges allowed Unreasonable to leave their
vehicle fueled on the pad while warming it with propane heaters for
hours before a flight attempt. This stands in contrast to how things
would have gone if the event was still held at Las Cruces or Holloman.
In the end, I think what we're getting at is that the X PRIZE needs to
work harder at making the rules for contests such as this more
consistent for the life of the contest. It shouldn't get easier and
easier until someone eventually claims the prizes.
As the X PRIZE will tell you, most teams competing for such prizes
spend much more than they win. For many, this is ok if succeeding at
such an endeavor means you can take pride in knowing you achieved
something others before you could not. However, if the contest
gets simpler each year, it makes comparisons with previous efforts
meaningless, and diminishes the significance of the achievement.
Criticism of the format change aside, TrueZer0 feels incredibly
honored to have been a part of the NGLLC. Our experience was
remarkable. We've been completely spoiled. It'll be hard to find
another project/challenge as rewarding. From the X PRIZE, to the other
teams, to the FAA, and everyone in between, the people we met were all
outstanding. Thanks to all of you. Hopefully we'll be able to cross
paths with some of you again while going after the next crazy
challenge.
Wed Oct 7 13:13:31 CDT 2009
Awesome job Masten! I just watched Will's cell phone video. You
guys really made that look easy.
Sun Sep 13 13:37:53 CDT 2009
Congratulations to Armadillo for a well earned success in the '09 LLC.
Unfortunately, coverage of their attempt this year was disappointing.
Two years ago, this event was a major attraction at the X-prize cup
with 85,000 people attending. Last year it was closed to the public,
but webcast. This year, coverage has been reduced to intermittent text
blurbs on twitter with some cell-phone still pictures. Ugh!
I have great respect for the people working at X-prize. However, if we
were competing this year, I'd be annoyed at that level of coverage.
Teams competing in the LLC have to work remarkably hard to get there.
Once they do, it should be reasonable for them to expect a similar
effort on the publicity side from the event organizers.
Sun Jul 5 09:45:16 CDT 2009
An update to this page has been long overdue.
After last year's contest we really have not done very much rocket
work. In February Scott and I spoke at the FAA Commercial Space
Transportation Conference. That was enjoyable, and we got to meet some
interesting people. In April we went to Space Access '09. There were
many LLC teams present, and it felt like a bit of a reunion.
On the way to Space Access, we made a small detour to visit to Scaled
Composites. I've been a fan of Burt Rutan for some time, and Brooke
Owens (our host for the FAA conference) pulled some strings to help us
set up a visit. That was an awesome experience. The people at Scaled
are every bit as bright and motivated as we expected. They're working
on some amazing stuff and were impressively humble, considering what
they've achieved. I'd personally like to thank Matt and Ben for taking
the time to show us around, and everyone at Scaled for being so open
and friendly.
At the end of our visit we got to sit and chat with Burt for quite a
long time. How cool was that? After speaking with him, it's easy to
see why he's been so successful. He really loves what he's doing. His
energy and enthusiasm are infectious, and his no-nonsense
get-out-and-do-it approach to life is obvious.
During our talk, Burt asked if we'd like to move out to Mojave, and
work for Scaled. I'm pretty settled in Illinois, and enjoy working as
an independent contractor. As undeniably cool as the work would be,
tearing up my life and moving to Mojave is not the right choice for me
currently. Scott on the other hand, was a little more open to the
idea. Recently, he went back for a full-on job interview. Scaled made
him an offer, and just a few days ago, he accepted. He'll be moving
out there shortly, and starting in early August.
What all of this means for TrueZer0 is unclear. Given the rules
changes, the costs, and need to recover from last year, we had already
decided that we would not be competing in 2009 (which is partly why
this website has been so quiet).
If there are any significant prizes remaining, Scott's still motivated
to get out and compete in 2010. I'm somewhat more reserved. Working on
a project like this involves a huge amount of time, and a ton of
testing. I'm not sure it is practical to believe that we could make it
all happen with Scott in California, and George, Josh, and myself in
Illinois. I guess we'll need to see how things work in practice.
It's with strong mixed feelings that I watch Scott head out to
Scaled. Sincerely, I'm excited and happy for him. His
path in life has just taken a major turn. This is an incredible
opportunity, and there's no doubt he'll make the most of it.
But also, I'm feeling quite sad. I've had a great time working with
Scott on all of our projects leading up to this point. Beyond the
strong friendship, there's a dynamic between us that I have
experienced with few others. We bring together a rare balance of
practicality and perfectionism, of theory and empiricism. There's no
telling what projects we would have taken on after the LLC, but I know
they would have been amazing. I'm definitely feeling the loss that we
won't be able to continue doing those things together.
The challenge this year ought to be interesting. It sucks to be
sitting on the sidelines, but we'll be watching closely, and wishing
the other teams great success.
Sun Nov 16 10:41:22 CST 2008
We've had some time to look over what happened and do some
calculations. It turns out that our concern about the Z-roll thrusters
was valid. It appears that they may only have been delivering about
15% of the thrust we expected. Although this explains the uncorrected Z-roll
and subsequent abort of our attempt at Las Cruces, it does not explain
where the Z-axis torque came from in the first place.
Currently, the torque is believed to have come from the motor itself
(not from the gimbal positioning). We think one or more of the
following may have caused it:
The orientation of the catalyst screens inside the motor
Non-uniform decomposition throughout the catalyst pack
Bulges in the catalyst pack from thermal expansion and improper retention resulting in non-symmetric channeling of the exhaust
Though these factors would probably lead to small amounts of toque from
the motor, the simulator shows that it only takes a small amount of
torque to produce Z-spin rates similar to what we saw during the flight.
------------
After taking a couple of weeks to get our lives back in order, the
team has talked it over, and we're contemplating trying this again for
2009. Given the experience we gained last year, we would have a
serious leg-up, and might even consider leveraging that experience
into a level 2 attempt.
However, we've got some issues to resolve before trying this again.
First, the X PRIZE foundation has mentioned that they are considering
changing the contest from the late October competition to a "first to
demonstrate" format. The idea is that as soon as a team is ready,
they'd invite the judges to view their attempt (presumably at their
own venue). If the team succeeded, they'd win the prize.
This probably makes sense from a financial viewpoint -- it has to be
expensive for the X PRIZE to put on the event in late October, and it
is possible that it is not drawing enough attention to justify that
cost. We can understand this might be motivation to make such a
change.
The downside however, is that fewer teams will be willing to begin
expending the money, effort, and time necessary to build and test a
vehicle that can compete, knowing that the prizes could be off the
table before they are ready.
If the event had been first to demonstrate in 2008, there's absolutely
no way we would have started working on it with the likes of Armadillo
around. Having a known deadline makes it much easier for newer/smaller
teams to justify getting started.
Not only does the format change favor teams that are further along, it
also favors teams in warmer climates (testing is a big part of this
process and it is harder to do in cold/snowy weather).
Although these days we'd probably benefit in the "further along"
category, we're headed into winter here in Chicago, and would not be
able to start testing again until spring. This would put us at a
disadvantage compared to some of the other teams in the competition.
In addition, for teams trying to generate external funding, the new
format is likely to be less appealing to the media than the October
event. Less media interest translates into fewer potential sponsors.
It'd be really nice to know if the format of the competition is
changing before we jump in again. If we expect to have a level 2
vehicle ready by the end of October, we'd need to get started
designing and building by the first of the year. With uncertainty
about the format, we'll have a much harder choice to make.
Finally, last year we funded this project entirely on our own. It was
not insanely expensive, but it was certainly enough to end the year
with bank accounts that were lower than where they started :-). Don't
get us wrong -- the experience was well worth it, but none of us can
really afford to do this again in 2009 without some additional
funding.
We're not eager to solicit from the public at large -- most people
have better things to do with their money than to help us play with
rockets. However, it seems plausible that there are organizations out
there that could benefit by funding us. Media exposure is certainly
one such way, but there may also be opportunities for us to partner
with organizations or individuals who could benefit from the LLC
experience more directly.
If you are interested, please email us. The address is:
rocket "at" truezer0.com
Tue Oct 28 17:10:06 CDT 2008
We got back from the challenge late last night (driving from NM to Chicago).
The event was awesome, and being able to participate in it was even more so!
We owe some serious thanks to everyone who helped make us feel welcome and
who helped make it possible for us to compete:
X PRIZE, judges, and volunteers (You guys are amazing at what you do -- this was not an easy event to organize but you made it look simple)
FAA (Thanks for helping us novices through the process, and working so hard on our behalf)
NASA, and Northrop Grumman (The reason the event exists in the first place)
SpeedUp (Thanks a TON for driving the peroxide out to Las Cruces for us without ever having met us)
Armadillo (We were more than impressed with your kindness, professionalism, and skill)
Las Cruces Airport, Fire, and Police (Thanks for letting us make a mess, and helping us clean it up)
These pictures were taken by Chris Nelson (our Safety Officer who kicked butt for us, and made my job much simpler):
As I'm sure most of you know, Ignignokt did not survive the event. His flight lasted 18.8 seconds.
When you watch the video:
there are some things to notice:
First, the vehicle lifts off cleanly, makes a correction to get the
motor under the center of mass, rises up to 10 meters and centers
itself over the pad. Notice that the exhaust is clear.
At this point, everything looks healthy, so the vehicle is commanded
to travel up to 55 meters. Just before getting this command, the
exhaust starts to cloud up a little. As thrust is turned up to start
the climb, we see even more steam in the exhaust. This steam indicates
that the motor is not running as efficiently as it should be. However,
as far as we can tell, this would not have limited the vehicle from
flying for the full 90 seconds (unless it continued to get worse).
As the vehicle climbs toward 55 meters, it jostles back and forth a
bit. We see this in the simulator too, and it is considered normal.
However, the vehicle also starts spinning on its Z-axis. This is NOT
normal. Any Z-axis torque on the vehicle is supposed to be countered
by the attitude thrusters.
Just as the vehicle reaches 51 meters and is slowing its ascent, the
Z-axis roll is becoming more than the control system can manage and
the vehicle starts to wobble and tip over. As it gets out of control,
a "hard abort" signal is sent to the vehicle to tell it to shut down.
The motor is turned off and the vehicle begins to fall out of the sky.
As it falls, Scott uses his safety system radio to initiate the safety
system abort. This tells the vehicle to open the valve at the top and
release the tank pressure (as well as a stream of peroxide). As the
vehicle is falling, you can see the peroxide trail behind it.
The peroxide hit some nearby plants, causing a small fire, and it also
hit some generators that were being used to power a camera that was
set up in the area. We learned that generators and peroxide don't mix
very well.
On the long trip home, Scott and I talked over what could have caused
the Z-axis spin to get out of control. Our current theory is that the
attitude thrusters have never been making the right amount of thrust
because the valves that control them had more of a pressure drop
across them than we anticipated. Since all of our previous tests had
been on a tether, and since the tether torques the vehicle, we had
always discounted test evidence that showed that the thrusters were
not correcting Z-roll, believing that the problem was simply that the
thrusters were being over-powered by the pull from the tether.
However, during our trip, we realized that we've got data from our
various test flights which can be used to work out how much thrust was
being made. We'll be doing this in the next couple of days.
At this point, it is not clear if we'll try again for the challenge
next year. Certainly, we'd like to demonstrate that the rocket can be
made to work well enough to complete, but we're not sure we'll have
the time and money to do this again. We'll keep you posted.
Sat Oct 18 09:50:28 CDT 2008
We've got a tank pressure test to do today, and some finishing touches
on the video transmit box, then we're packing up to head to Las Cruces.
Our vehicle's been flying for about two weeks, but there's no more
time to test. The challenge is upon us.
When we fly at the challenge, the following things will be happening
for the first time:
Flying with no tether
Taking off from the ground
Landing on the ground
Flying at 50 meters
Translating
Flying for more than 75 seconds
Motor running on 90% HTP
Given such a small list of untested things, it's hard to imagine what could go wrong. ;-)
Even with all the uncertainty, we're incredibly excited to get out there and
give it a shot.
I'm not sure what our Internet connection will look like while we're gone, so updates
to this page may stop until we return.
Wed Oct 15 16:35:49 CDT 2008
Lots of activity today.
First, a big thanks to the FAA for going above and beyond to get us
our 90 second tether waiver in a very short time. We're incredibly
grateful for all the effort.
We got the waiver last night, but ran out of daylight before being
able to test. So, we got up bright and early today and went out to the
test site. The weather forecast called for morning rain, and we wanted
to get set up before things got too bad.
Thankfully, the rain held off for much of our setup. However it
started to get a little nasty by the time we were ready to test.
Here's a tip for future LLC participants who build H2O2 rockets: Don't
test in the rain. When the air is already saturated, the cloud
generated by your rocket will make for very unimpressive video. For
example...
Although the rocket cannot be seen for most of this video, I assure you it
stayed in the same place for almost the entire flight :-).
Despite the visibility problems, a couple of things went very well
today. First, the motor lifted the 500lbs of rocket and fuel into the
air with no drama whatsoever. We were concerned that the motor might
not generate the necessary thrust, since it had only been tested at
this thrust for very short periods of time previously.
This test also showed us that the control system is working like a
champ. It can keep the vehicle stable at its lift-off weight of 500lbs
all the way down to its empty weight of 171lbs. Looks like the time
spent tuning it in the simulator paid off.
There were also a couple of problems.
In the rush to set up before the rain got too bad, we neglected to
null the gyros before launch. This is not much of a problem for the X
and Y axis gyros as the rocket's control code can correct for offset
and drift in these gyros during flight. However, the Z axis gyro must
be carefully nulled prior to takeoff. If it is not, the rocket will
slowly build up error on the Z axis, and this will eventually
compromise its ability to position itself correctly. This happened roughly
70 seconds into our test, and the test was aborted at about 75 seconds.
Finally, the motor's efficiency is still in question. Even without the
abort, we estimate that the vehicle would only have flown for another
6 or 7 seconds. This is not enough for the challenge. We've got some
options (using 90% HTP is one of them). We're looking into this now.
Sun Oct 12 10:08:59 CDT 2008
The last couple of times we tested, we noticed that the motor was blowing
excessive steam. Yesterday we opened the motor, and found out why.
That photo is a section of the catalyst pack, about 1/4" of the way in.
Those screens should be all beige. That pattern of dark spots lines up
with the inlet holes in our motor's injection plate. The spots are
dark because the catalyst has been eroded from the screens by the
force of the peroxide blasting through them. It appears that the
injection plate had too few holes in it, and was concentrating
the peroxide into forceful jets.
This explains why the performance of the motor has been decreasing lately.
As bad as it seems, we got lucky in a number of ways:
First, we already had a plate with more holes in it from previous
experiments with the motor. We had been using it successfully for
quite a while (with no serious erosion problem), but at some point we
replaced it with the current one because we thought it might improve
performance (it did not).
Second, we already had some new catalyst screens made up from experiments
we were doing early on in the process.
We've added the new screens, swapped back to the previous injection
plate, and made a few other tweaks to the motor. Testing shows that
things now appear happier than ever. The motor is once again blowing
clear, and efficiency is definitely improved.
Today, Scott will be running the numbers to find out if the efficiency
is actually good enough for the 90 second burn needed for the
challenge.
BTW, the takeoff and landing tests went great. The vehicle is flying like
a dream.
Fri Oct 10 20:21:49 CDT 2008
At last, a solid convincing hover! And none too soon. We leave for
the challenge in just over a week.
It's taken some effort, but the vehicle appears to be flying pretty well.
We don't yet have a permit from the FAA to fly it for more than 15
seconds, so the hover is short, but there's no doubt it is doing what it needs
to be.
Unfortunately, we cannot rest easily. The motor appears to be throwing
more of a cloud than we'd expect for a reasonably dry day. Also, the
numbers make it look like the efficiency may not be where it needs to
be to fly for 90 seconds. We're digging into it, and will also be
doing some takeoff and landing tests tomorrow.
Thu Oct 9 20:34:19 CDT 2008
Yesterday some of the fine folks from the X PRIZE came out and watched
us do a flight. It was great to have them visit. We hope our meager
flight test was not a disappointment. (We were testing some new code,
and the vehicle flew in a (somewhat disappointing) large slow circle.)
On the plus side that test flight helped reveal a problem that we hope
is the last major stumbling block before we've got a clean hover.
The issue has been solved, so we'll be out testing again Friday,
Saturday, Sunday, and possibly Monday and Tuesday if needed (yes, at
this point, everything else in life is on hold).
Assuming we can get the vehicle flying cleanly by Friday or Saturday,
we should have enough time to test some takeoffs and landings...
Sun Oct 5 20:57:31 CDT 2008
Testing today went ok, but we were hoping for better. The vehicle is
getting ever closer to hovering well enough for the LLC, but the
challenge is drawing near and we're really not where we need to be.
Here you can see the vehicle maintain position (although a little
awkwardly). It appears fairly stable until the end of the flight,
where it takes a bit of a dive. It was quite windy out (although it
should not have been a major problem). Also, the tether spins the vehicle
around just as it runs out of fuel.
Once again, we'll be pouring over the numbers to see if we can
make things better before next weekend.
Sun Oct 5 12:25:13 CDT 2008
It's been a very busy weekend. We are racing to get the rocket
hovering cleanly before the telescopic forklift is returned on Monday
(not to mention that the challenge is less than 20 days away!)
After numerous ground tests, we found a couple of fairly major problems.
First, it turns out that the range of the ADIS16350 gyroscopes is
specified a bit oddly in the datasheet. The datasheet claims that the
device has a +/-300 degree/sec setting with 14 bit resolution.
However, it appears that in this mode, the device actually can measure
+/-600 degrees/sec full scale into 14 bits (looking very carefully at
the datasheet seems to confirm this, although it never says so
directly). This meant that all of the readings we were getting from
the gyros were actually 1/2 as large as they should have been. This,
in turn, was causing the vehicle to react sluggishly to changes of
orientation, and was one cause of the drift we have been seeing.
Further, I had an error in the code which converts from GPS lat/long
(spherical) coordinates to the local cartesian system that the rocket
uses. This error caused the Y value to be negated, and this meant that
the vehicle was always trying to fly in the wrong direction along its
Y axis (oops). (This problem did not show up in the simulator because
the simulator contained the same bug, and the two canceled each other.)
We're headed back out to test again later today (if the rain does not
stop us). Hopefully we'll have some good news to report.
Mon Sep 29 09:21:44 CDT 2008
Our best flight so far.
The positional control loop has been put back, and appears to be doing
something useful. The vehicle takes off vertically, holds position for
a moment, but then begins to drift.
It's not yet clear why we're getting the drift. Hopefully a good close look
at the data will yield some insight.
The next flight test probably won't be until next weekend.
Sun Sep 28 12:29:54 CDT 2008
The tall forklift is a huge help. We can fly the vehicle for longer
periods of time before it hits the tether, and really get a feel for
how it is behaving.
Here you can see the vehicle maintaining orientational stability. For
this flight, the position control loop is turned off because it was
not working very well.
Later today, we hope to fly one more time with improved positional
control.
Sat Sep 27 08:29:24 CDT 2008
Yesterday we had time to set up the lift, but it got late so we decided
not to test. Today, we expect to be able to fly.
Tue Sep 23 17:50:07 CDT 2008
We had a meeting today with the FAA. They came out to Rockford to
inspect our vehicle as part of the permitting process. The meeting
went well. The folks from the FAA were great to talk to, and they
helped us get more confident that we're providing them with what they
need to grant the permit.
We enjoyed having them to come out to our site, and we hope the trip
was as worthwhile from their perspective as it was from ours.
The next flight test should be this weekend (Friday at the earliest).
We're renting a 40+ft telescopic forklift that should give us the
height needed to perform the next set of tests.
Sat Sep 20 10:13:38 CDT 2008
To the untrained eye, this is probably one of the uglier flights we've
made. But to us, it is incredibly encouraging.
First, the throttle is working very smoothly... Not wanting to send the
vehicle to the top of the tether like last time, we tried to gingerly
get it into the air. As you can see, the takeoff is nice and gradual.
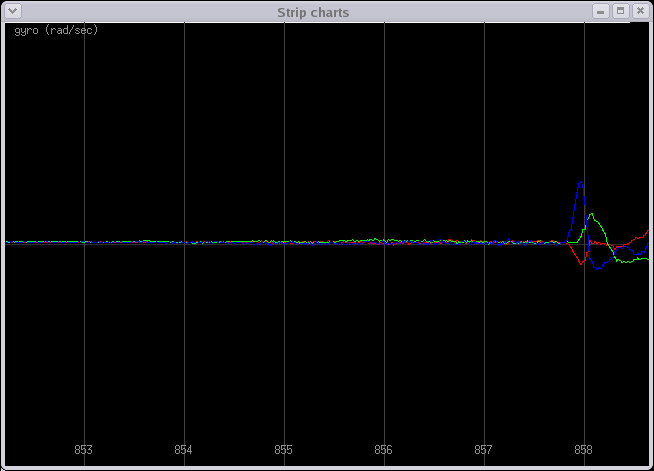
Second, the vertical stability control loop is working for the first time, and it
appears to be working quite well. As the vehicle ascends, it is pointed solidly
in a constant direction until it hits the tether. In fact, looking at the gyro
data, you can see that the control system did a fine job of keeping the vehicle
from rotating during the (admittedly short) ascent.
The X, Y, and Z gyro axis are represented by the red, green, and blue lines
respectively. Full scale on that graph is about 300 degrees/second. The fact that the
graph stays flat up until the vehicle hits the tether just before second 858 makes
us very happy.
Finally, both Scott and I aborted the flight pretty much
simultaneously. I told the flight computer to shut down, and Scott
triggered the safety system. This is the first time the safety system
has been used to end a flight, and it worked without problems. (You
can see the nitrogen venting from the top at the end of the flight).
The test was not without some issues however.
When the vehicle ascended, it was supposed to go straight up.
Apparently the control system thought up and to the right was the
better choice. We'll be looking at the data to work out what happened.
Also, after it hit the tether, the control system got a little
aggressive trying to correct, and flung the vehicle up and to the left
pretty hard before we aborted. The abort was energetic, and some
pieces of the vehicle got bent. At the same time, the telemetry
antenna got caught in the tether and was broken off. None of the
damage was major, and it should all be fixed over the next few days.
The next step is to widen the flight envelope a bit. George's forklift has
been great, but we need to give the vehicle a little more freedom so we can
see how it will behave. Something along the lines of that telescopic forklift
that Unreasonable is
using would be really nice if we can find one inexpensively.
Update: 9/17/08
Yesterday, we had planned a flight, but noticed a problem caused by
our recent testing of the safety venting system (it caused a valve to
get really cold, and this caused the valve fitting to loosen). Since
this fitting also physically supports the payload on the rocket, we
decided it was better to analyze and fix the problem instead of
pushing for another flight.
The problem should be fixed by Friday. So, we expect be able to make
some flights Friday, Saturday, and Sunday.
Update: 9/15/08
The rain kept us from testing all weekend, except we did slip in a test
late Sunday. Unfortunately, the humidity was so high that the cloud generated
by the rocket did not disperse, and we could barely see it during the test
(I had to abort the test because I lost sight of it).
Looking at the data of the test, it looks ok, but there're still some
needed improvements.
In spite of the rain, we did manage to get lots done. The safety
venting system is now in place, and the attitude control thrusters
have been installed. Both were tested and appear to work great.
The hardware of the rocket is essentially 100% complete now.
In all, it was a fairly productive few days.
We'll try to test again on Tuesday.
This is the second flight test of the vehicle. The throttle pulsation is solved, but I goofed on the controls and sent the rocket a bit too high. Also, the vertical balance control loop appears to be ineffective for some reason during this flight (the vehicle tilts left (which would not happen if the vertical control loop was working properly)). The next few days will be spent analyzing the data, to work out why.
This is the first flight test of the vehicle. There's a throttle pulsation we're looking at, and the rocket gets a little sideways before we shut it down. Still, there's lots going right here, and the rocket is flying on its own for about four seconds.
This is a repeat of the previous test. The control loop has been corrected, and the vehicle is now exhibiting excellent throttle control. Here it makes a clean consistent 300N of thrust for 8 or 9 seconds until it runs out of fuel.
In this test, the vehicle is tethered to the ground. The computer is attempting to generate a constant 300N of thrust. At the start of the test significantly more thrust is generated and the vehicle hops. Also, near the end of the test, the computer has a little trouble holding the thrust to 300N and there are a couple more little hops.
Testing begins
We just got back from the team summit at Holloman Air Force Base in New Mexico. We got to meet the other teams, and speak directly with the XPrize, FAA, and HAFB folks. It was a great experience.
While we were there, we were invited to speak on "The Space Show".
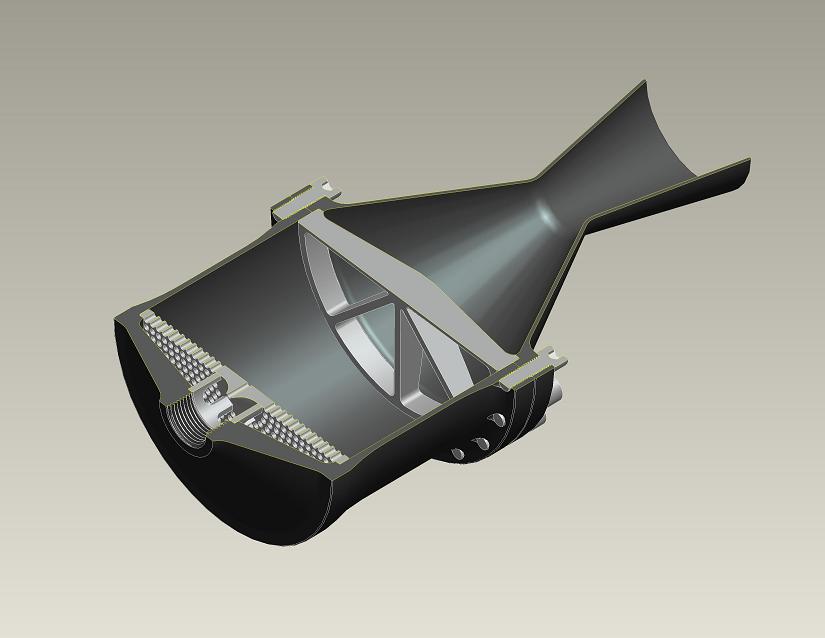
Rough ProE model of vehicle (currently under construction)
More of Josh and George's handy work. These are almost all of the bits that will form the vehicle.
The MSU and PSU electronics and enclosure are complete.
The tank hemispheres have arrived.
Our FAA permit application has been declared "complete enough". That's great news!
We're thankful to have had Unreasonable's permit applications to look at while preparing our own.
In the same spirit of openness, here's ours.
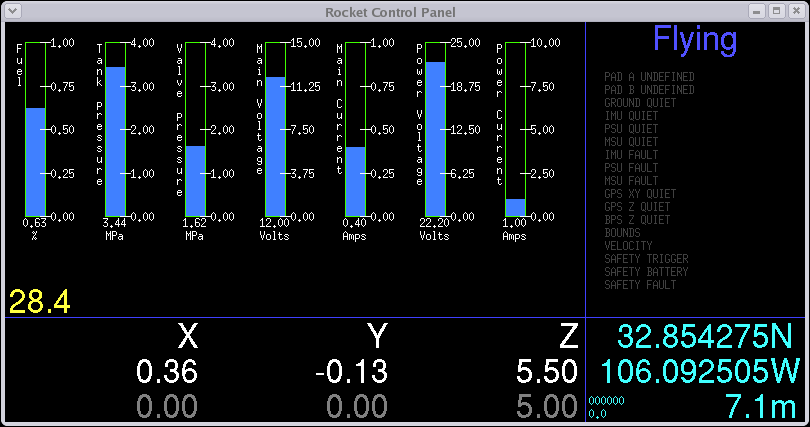
Here's a screenshot of the ground operator's control panel.
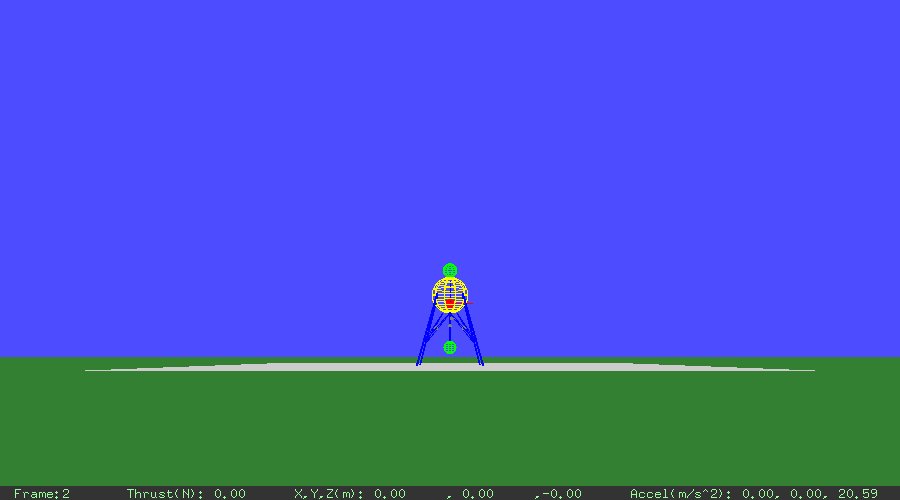
Here's a very crusty video (MPEG-2) made from the simulator. What you see is the rocket's real control system flying a simulated vehicle between two pads 50m apart.
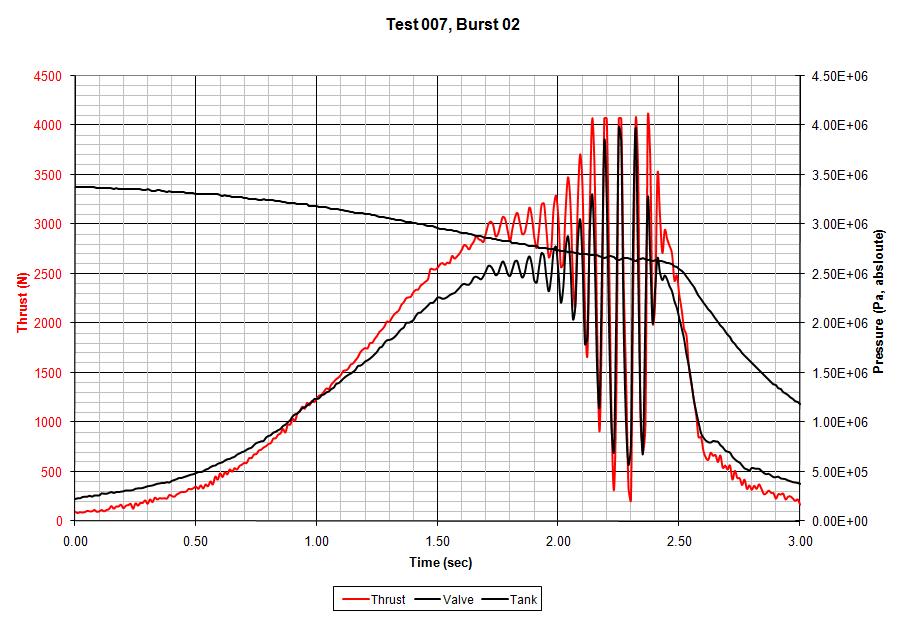
Thrust, Tank Pressure, and Throttle Valve Pressure vs. Time (Test 7)
Thrust oscillation starts if the tank pressure approaches the pressure at the exit of the throttle valve.
Thrust is smooth as long as the tank pressure is about 0.50 MPa greater than the pressure at the throttle valve.